Placement de documents anciens dans une géométrie 3D
It could be interesting to place ancient documents like drawings or photographs in a recent 3D model. It may open several uses like comparing before/after or guess the photo has been taken from. It’s also possible to reconstruct a model from a collection of ancient photos. Other uses are yet to be determined.
Il peut être intéressant de travailler en 3D d’après des archives graphiques dont on ne maitrise pas toujours l’origine. Cela peut avoir plusieurs usages, superposer des vues avant/après, replacer dans l’espace des points de vue alors que l’environnement a changé, construire une photomodélisation d’une collection de photos ou encore projeter un état antérieur sur un état présent. D’autres usages sont encore à déterminer.
If the work is based on a recent digital photo, things are much easier, but here we deal with old documents, old photographs or drawings. The most reliable technique, even if it remains tedious, is to find homologous points on the model and the photograph. It is a rather old process that preceded the automated operations of the recent software for photogrammetry. It can be done either in 3smax or Blender or other 3D graphic tools.
Si les documents à utiliser sont au format numérique, l’opération peut être assez simple et passer par un logiciel de photogrammétrie. Les géométries anciennes et nouvelles peuvent être assemblées par points homologues. Si les documents sont partiellement transformés ou très anciens, il faut procéder autrement.
La technique la plus fiable, même si elle reste fastidieuse, est celle qui consiste à désigner sur le modèle puis sur la photo, les points homologues. C’est un procédé assez ancien qui a précédé les opérations automatisées des logiciels récents de photomodélisation. 3Dsmax possède les outils qui permettent de le faire, d’autres outils comme Blender, ont des protocoles assez proches.
Preparation
The first step consists on verifying the possibility of superposing the old photo and the 3D model by finding a similar view.
Dans un premier temps, un test est réalisé sur une vue ayant servi à la photomodélisation de l’architecture. Il s’agit de vérifier dans un premier temps que l’on peut retrouver la position parfaite, puisque les documents sont cohérents.
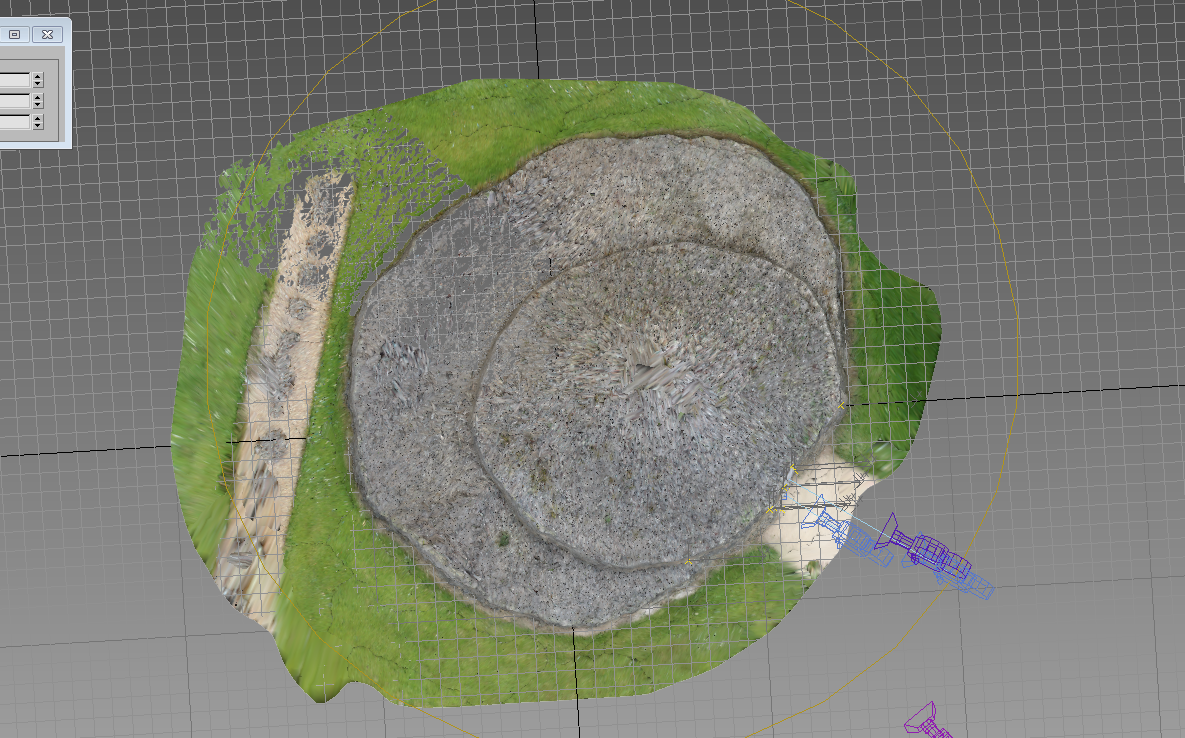
The 3D geometry is openned in 3DsMax :
Le modèle 3D est chargé :
It’s no need to have a very high resolution to start. 2000×1123 is here far enough.
La photo devant servir pour le calage est ramenée dans un format plus léger 2000×1123, une résolution plus grande n’est pas nécessaire. 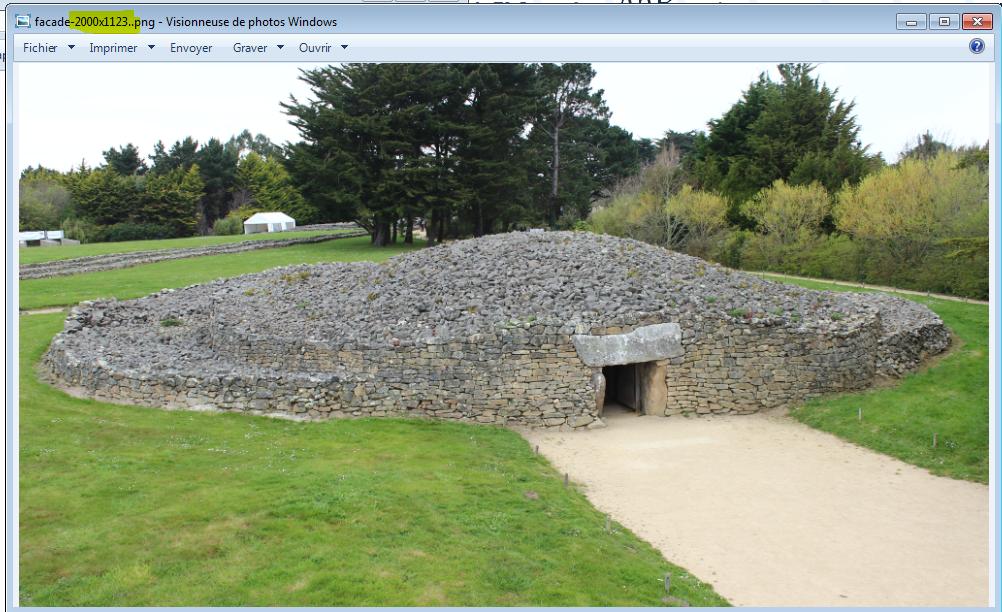
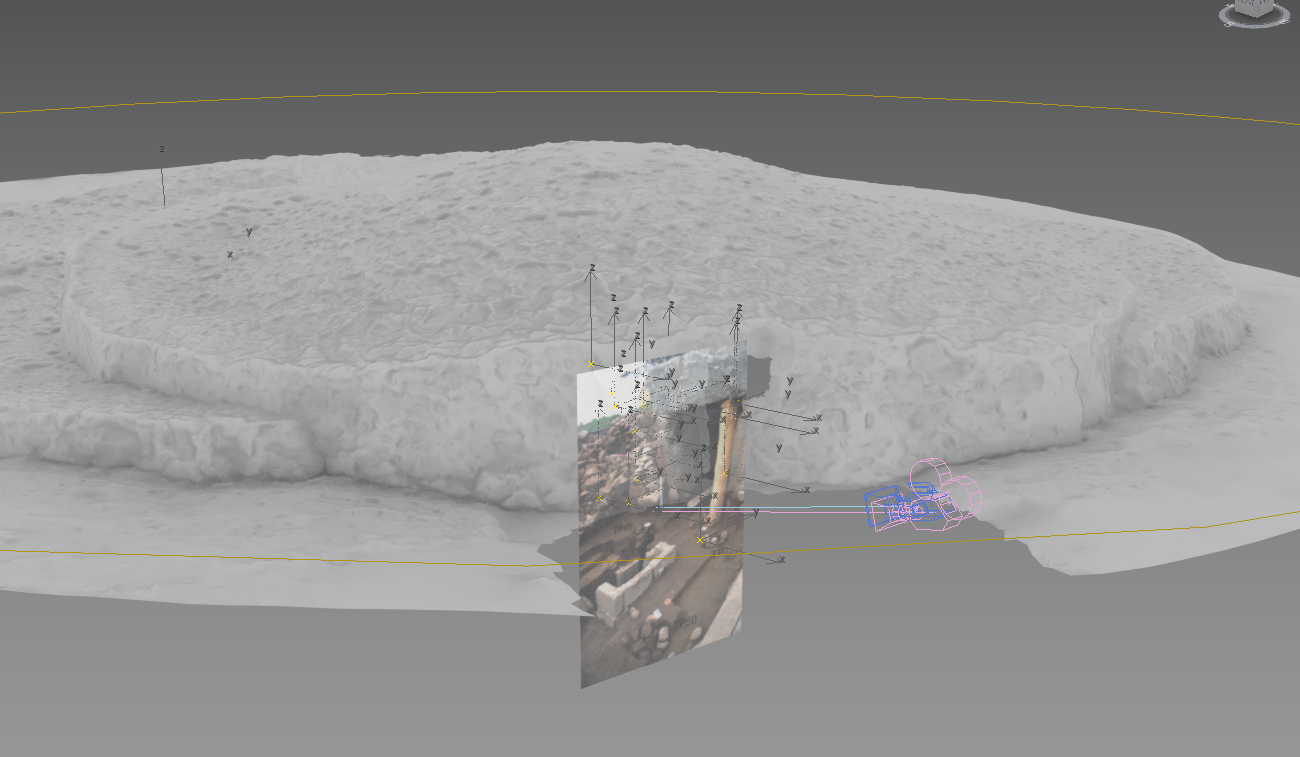
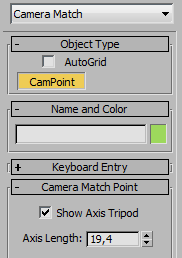
Using « Camera Match » in 3DsMax, match points are pinned on the 3D geometry.
Avec la fonction « Camera Match » les points de corrélation sont positionnés sur la géométrie :
Correspondances are set with « Camera Match »
Puis les correspondances sont définies toujours avec la fonction « Camera Match »

Once done, a camera has to be set. the 3D geometry is then automatically positioned to match the photo.
Une fois fait, il faut créer une caméra et le modèle est positionné dans la perspective de la photo.

The Matching is perfect, it’s now possible to find the original location of the camera when the photo has been taken.
La superposition est parfaite, ce qui permet de retrouver la position de la caméra au moment de la prise de vue.
En semi transparence : 
This first test was an easy one. The photo was recent and the matching process was easy. Let’s try now with an old document taken from a PDF file. EXIF information is lost or have never existed for analog photographs.
In this second test, the view is taken from the PDF file « Autour de la Table ».
Dans cette seconde vérification, la photo est extraite du rapport au format PDF « Autour de la Table ». Les images sont vraisemblablement recadrées et ont perdu toutes informations concernant la prise de vue.

The size of the photo is 327×494 and has been put in background. The rendering size has been set with the same proportions.
La photo au format 327×494 est placée en fond d’écran. Et les paramètres de rendu sont réglés dans les mêmes proportions.
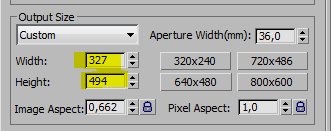
The background matches the output to avoid deformations.
L’image en fond d’écran est paramétrée de telle façon que son affichage correspondra aux proportions du rendu. Cela afin d’éviter toute déformation. 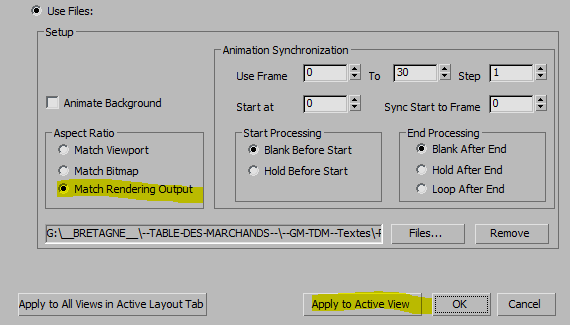
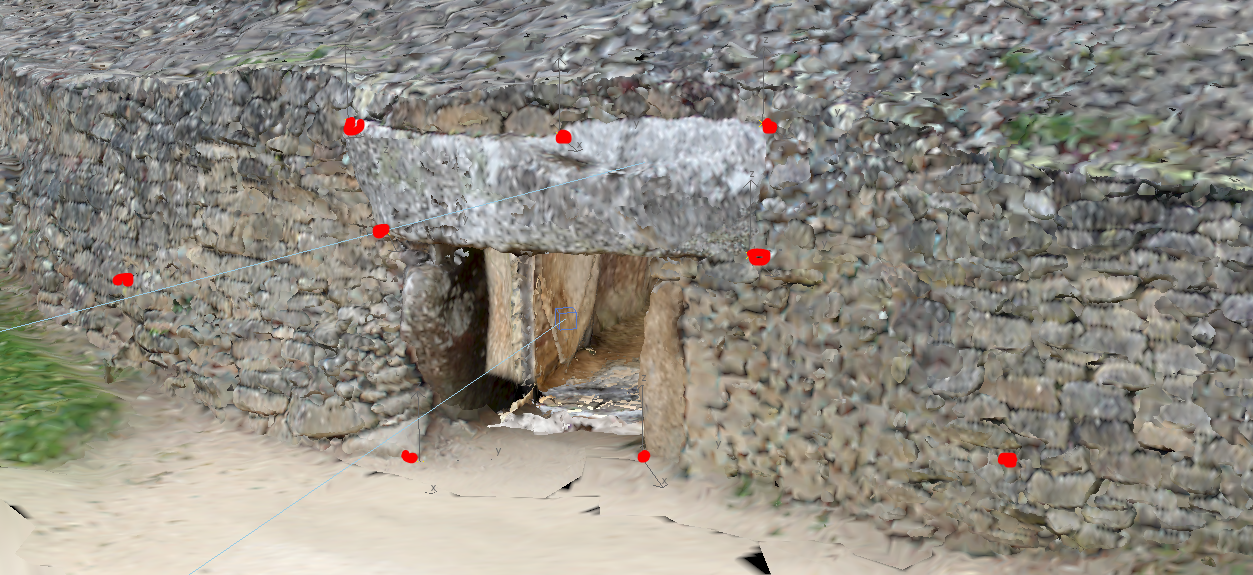
It’s now time to choose the matching points, precision is needed.
On détermine la position des points, il faut être précis car il n’y aura plus d’indications ensuite.
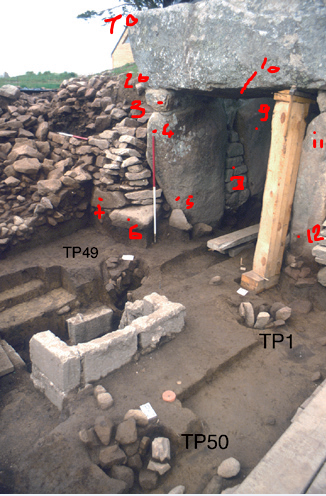
One done, the pins have to be positioned on the 3D model. There, one can notice that one stone is missing under the lintel, it may have fell, knowing that the cairn is a recent reconstruction.
Une fois le choix fait, il faut placer les repères sur le modèle géométrique. (On remarque qu’il manque une pierre sous le linteau, sur la photo à gauche.)

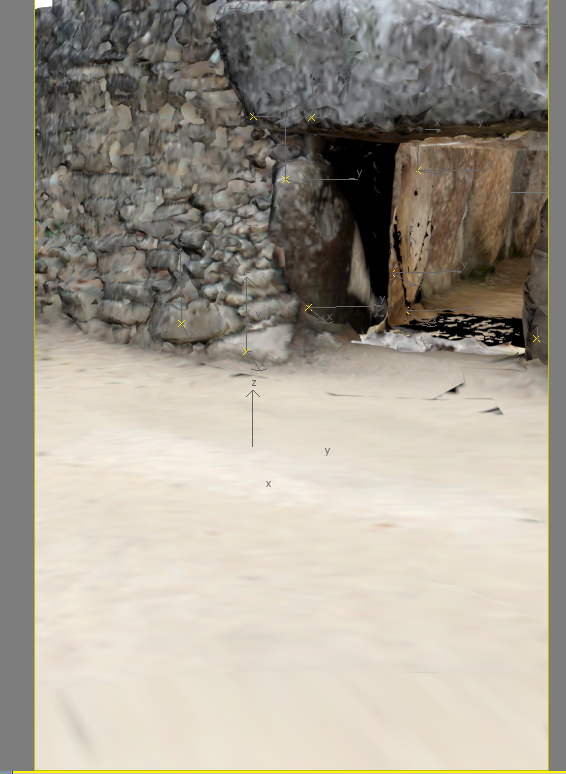
In the viewing window, the texture is in low resolution. It makes the positioning more difucult. Then, once again, it’s needed the match the pinpoints.
La texture étant montrée en basse définition, le jeu reste périlleux. Il faut ensuite positionner sur la photo placée en fond d’écran, la correspondance de chaque repère.

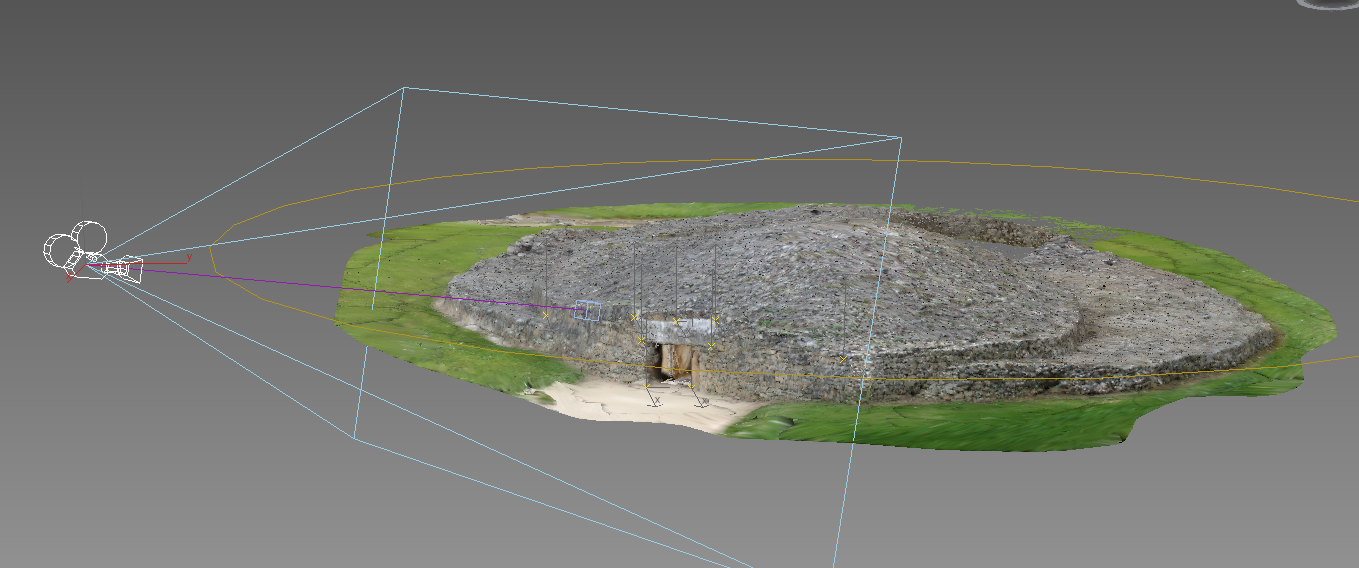
Then, a camera has to be created. If it matches, it is won. If not, it may be necessary to refine. It’s important to find angles.
Une fois l’opération terminée, il faut créer une caméra. Si le modèle se positionne bien, c’est gagné, sinon, il faut repenser la position des points, il est important qu’il y ait des angles.
Checking the results with transparency:
La vue est recalée, vérification en transparence :
 —
— 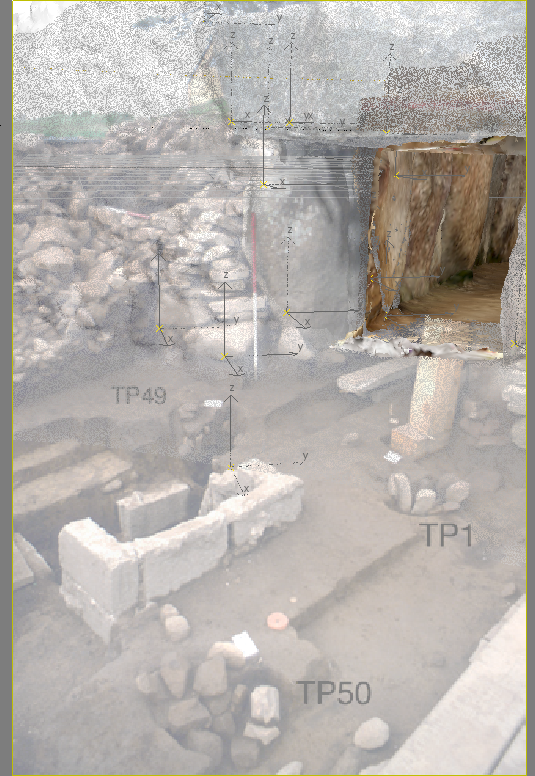
It’s now possible to guess where the original photograph has been taken from and nearly recreate the EXIF information.
On peut dès lors déterminer la position du photographe et par extention le réglage de son appareil au moment de la prise de vue. Mais dans cet exemple, le document est tellement modifié, que les erreurs sont probables :

By multiplying the method on a survey campaign, it would be possible to detect anomalies or details that had slipped from initial analysis.
En multipliant les exemples sur une campagne de fouille, il serait possible de replacer une bonne partie des vues et d’éventuellement détecter des anomalies ou détails qui avaient échappé à une première analyse.
Beau travail et surtout très intéressant !
Est-il possible à partir des photographies anciennes replacées, selon ce principe, retrouver des volumes anciens? et par extension, refaire des mesures? Il arrive fréquemment d’avoir une documentation lacunaire pour des fouilles anciennes.
Pouvez-vous transposer ce tutoriel sur le logiciel Blender.
Encore merci pour cet article