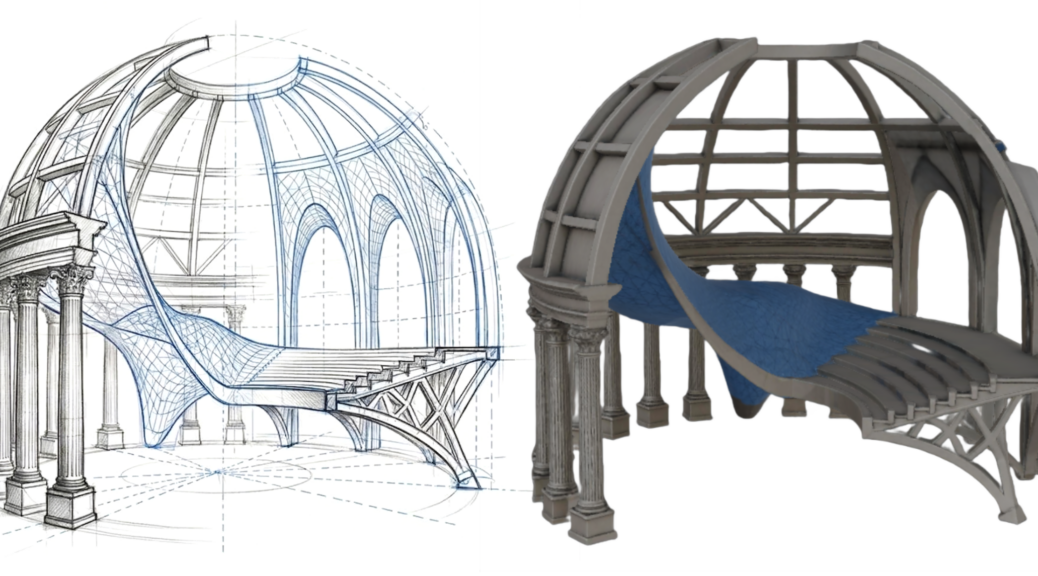
Test upon a complex shape
Will it be possible to convert this sketch into a 3D model. Let’s try out and compare the results. Continuer la lecture de IA – Image to 3D

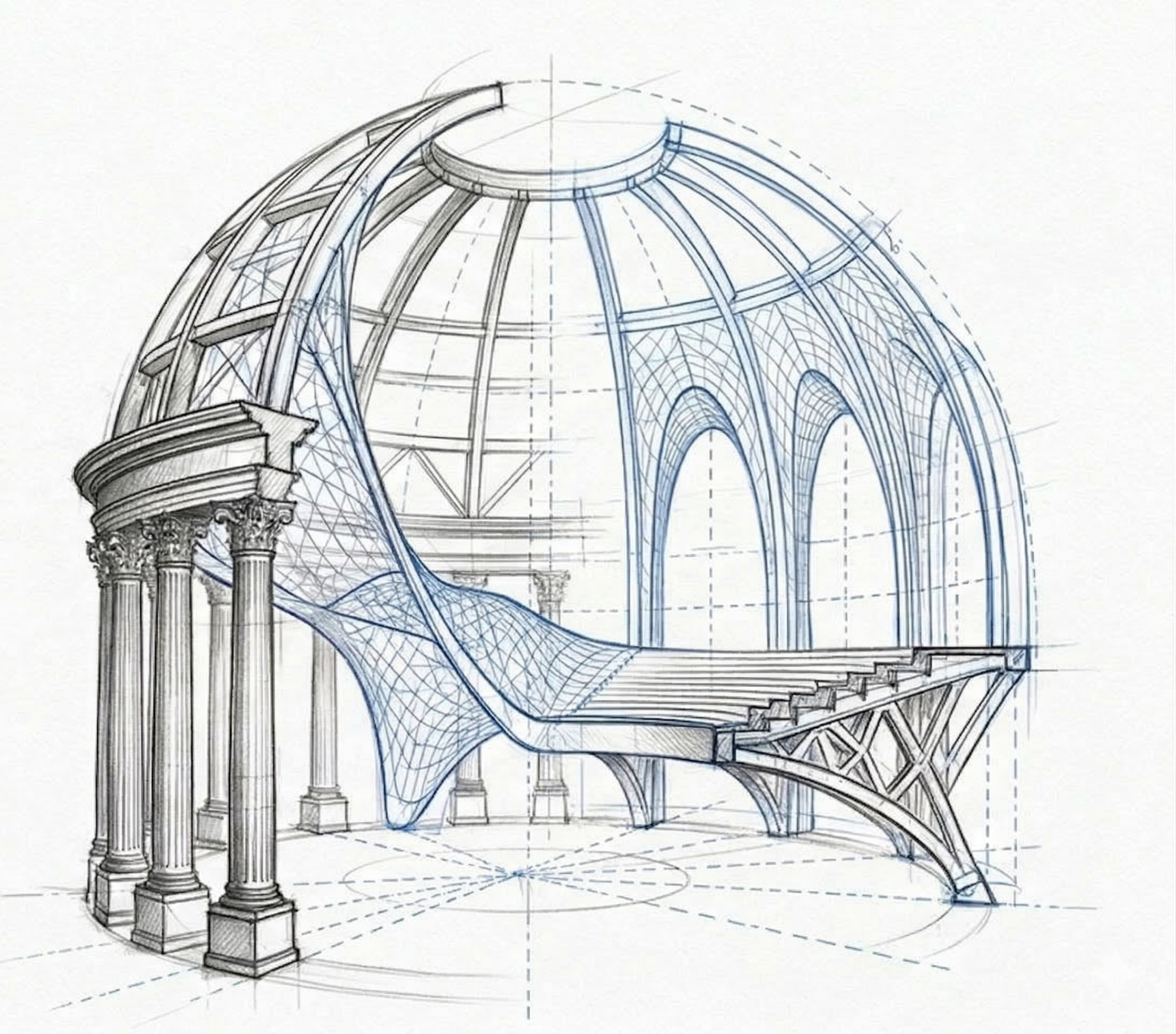
Test upon a complex shape
Will it be possible to convert this sketch into a 3D model. Let’s try out and compare the results. Continuer la lecture de IA – Image to 3D
Gaussian Splatting is a novel 3D scene representation technique that’s revolutionizing novel view synthesis (creating new camera viewpoints of 3D scenes). It emerged as a state-of-the-art alternative to Neural Radiance Fields (NeRFs) in 2023.
Core Concept
Instead of representing scenes with neural networks (like NeRFs) or explicit meshes, Gaussian Splatting represents scenes as millions of tiny 3D Gaussian « blobs » that can be efficiently rendered using a technique called « splatting. »
The technique represents a significant shift from implicit neural representations back toward explicit, differentiable graphics primitives, but with modern optimization techniques that achieve unprecedented quality and speed.
 Continuer la lecture de Gaussian Splatting: A High-Quality 3D Scene Representation
Continuer la lecture de Gaussian Splatting: A High-Quality 3D Scene Representation
À l’heure où les intelligences artificielles visuelles deviennent des outils de conception à part entière, savoir formuler un prompt — c’est-à-dire décrire avec justesse une intention — devient une compétence essentielle pour les architectes et les designers.
Prompter, c’est apprendre à choisir les mots justes, à structurer sa pensée visuelle et à traduire une idée spatiale en langage opératoire.

Voici une progression méthodique : de la phrase descriptive intuitive jusqu’à la composition complexe intégrant références, styles, matériaux et mouvements.
Il s’agit moins de “parler à une machine” que de penser par les mots pour orienter précisément le résultat, explorer des variantes, et renforcer le lien entre langage, image et projet. Continuer la lecture de IA – Prompter pour l’architecture

